Lorsque le modèle référencé est utilisé en mode « Accelerator », il est compilé une première fois et est ensuite réutilisé pour toutes les simulations suivantes. Tant que le bloc « Contrôle » n’est pas modifié, il n’y aura pas besoin de le recompiler.
Comment convertir un sous-système en modèle référencé ?
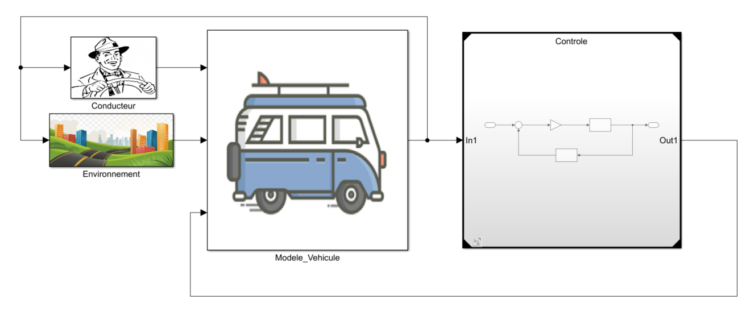
La conversion du sous-système (subsystem) en modèle référencé nécessite quelques étapes de préparation du modèle afin qu’il respecte certaines règles. En particulier, nous avons :
- défini les bus d’entrée et de sortie du modèle référencé,
- résolu les signaux qui passaient directement à travers le bloc « Contrôle » en utilisant des blocs « Signal Conversion »,
- géré le comportement des « trigger ports » présents dans le modèle référencé,
- résolu les boucles algébriques de la plateforme, suite au passage du bloc « Contrôle » en modèle atomique.
Les règles à respecter pour la conversion sont définies dans la page suivante : Convert Subsystems to Referenced Models – MATLAB & Simulink (mathworks.com)
Une fois que le modèle référencé est prêt, nous avons écrit un script qui permet de compiler le modèle avec mingw64, puis de compresser les fichiers dans une archive « .zip ». Cela permet de stocker et d’échanger proprement les fichiers du modèle référencé compilé.
Enfin, nous avons lancé des simulations de validation afin de garantir la stricte égalité des résultats de simulation avant et après la conversion et d’évaluer le gain de temps de simulation obtenu.
Quels sont les bénéfices obtenus ?
Voici les résultats grâce au « Reference Model » :
- le temps de simulation est divisé par 3 : une simulation dure parfois plusieurs heures, ce gain de temps est donc très appréciable,
- le temps perdu pour compiler le bloc « Contrôle » est largement compensé par le temps gagné lors des simulations,
- la plateforme est plus légère à manipuler et s’ouvre plus rapidement : le modèle référencé n’est chargé que lorsque cela est nécessaire,
- cette technique permet une approche modulaire : il est aisé de changer de versions d’algorithme de contrôle en modifiant simplement la référence du bloc « Model Reference »,
- la possibilité de protéger l’algorithme de contrôle avec Simulink Coder est pertinente : elle permet de ne pas révéler sa propriété intellectuelle.
Nous appliquons la technique du modèle référencé sur d’autres applications et notamment pour la validation d’algorithmes de contrôle pour les systèmes ADAS.
Pour avoir plus d’informations sur les détails techniques et les subtilités des modèles référencés, vous pouvez nous contacter et consulter la page Mathworks dédiée à ce sujet Model References – MATLAB & Simulink (mathworks.com).
Marouane Benaziz, juillet 2021