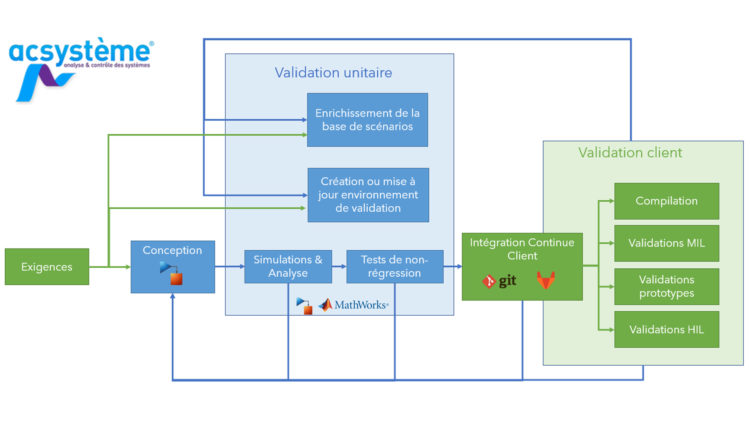
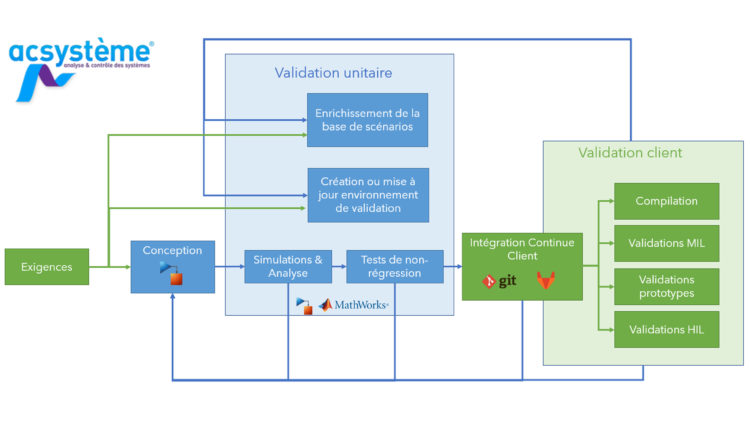
La conception
Nous mettons en œuvre notre expertise dans le domaine du contrôle et de Simulink afin de concevoir les fonctions demandées dans le cahier des charges en respectant les règles de codage imposées par le client ou, à défaut, par nos règles internes définies chez Acsystème.
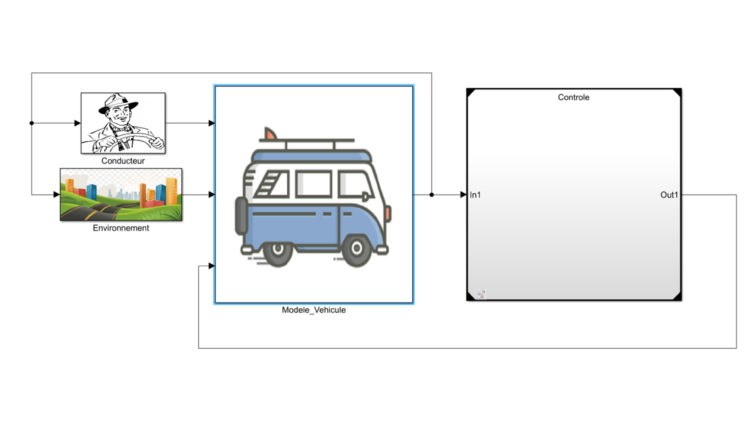
Les simulations et analyses
Lors du processus de conception, il y a de nombreuses itérations entre simulations et conception afin d’analyser le comportement de notre fonction et de nous assurer qu’elle ne comporte pas de bugs fonctionnels.
Lorsque nous sommes satisfaits du résultat, nous nous assurons à travers une batterie de tests de non-régression que les nouvelles fonctions développées n’ont pas dégradé les fonctionnalités déjà existantes.
La livraison du soft
Enfin, nous livrons le soft au client avec les résultats de validation. S’il dispose d’un logiciel de gestion de version et d’intégration continue comme GitLab par exemple, nous nous intégrons dans cet environnement. Ainsi, nous pouvons nous assurer que le logiciel livré passe les tests d’intégration continue et que le client puisse facilement le récupérer afin qu’il puisse faire ses validations en interne.
Un processus itératif
Lors de la validation du client sur le système complet et/ou dans un environnement réel, il peut éventuellement constater des bugs ou un comportement anormal. Dans ce cas, nous lui demandons de nous faire un retour pour que nous apportions les corrections nécessaires à la fonction. Ce retour est aussi une opportunité pour enrichir la base de scénarios si le bug est lié à un cas d’usage non identifié au départ ou améliorer l’environnement de validation s’il ne permettait pas reproduire les conditions nécessaires à l’apparition du bug.