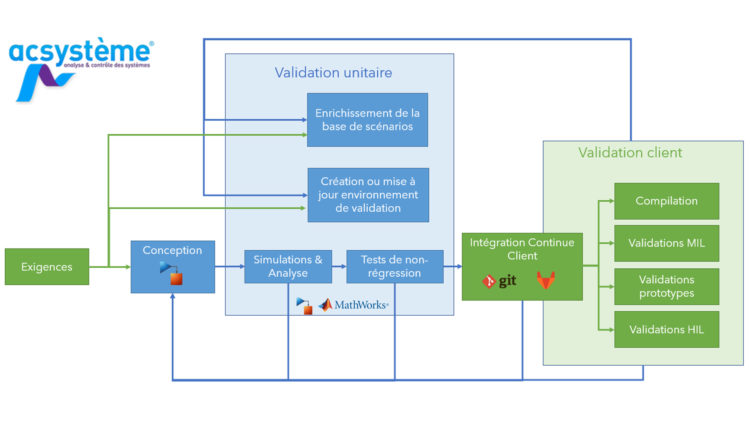
Design phase
We make use of our expertise in the field of control and Simulink to design the requested functions, and if necessary, to comply with coding rules imposed by the customer or otherwise by our internal rules defined at Acsystème.
Simulation and analysis
We make use of our expertise in the field of control and Simulink to design the requested functions, and if necessary, to comply with coding rules imposed by the customer or otherwise by our internal rules defined at Acsystème.
When satisfied with the result, we make sure that the newly developed functions have not degraded the existing functions using a battery of non-regression tests.
Software delivery
Finally, the software is delivered to the customer with the validation results. If the customer is using version control and continuous integration software such as GitLab, we integrate into this environment. So we can ensure that the software delivered passes the continuous integration tests, and that the customer can recover it easily to perform its internal validations.
An iterative process
While the customer is validating the software on the complete system and/or in a real environment, it may notice bugs or abnormal behaviour. In this case, we ask for feedback so that we can make the necessary fixes to the function. This feedback is also an opportunity to enrich the scenario database if the bug is linked to a use case not previously identified or to improve the validation environment if the conditions in which the bug occurs cannot be reproduced.