Description of the physical phenomenon
The field that relates to this invention is the control of electrical powertrains used for electrical and hybrid vehicles.

The field that relates to this invention is the control of electrical powertrains used for electrical and hybrid vehicles.
With these kinds of vehicles, electrical motor control interprets a driver’s intentions (accelerator and brake pedals) in a positive or negative torque setpoint. Then, the motor torque setpoint is passed to the power electronics part (inverter, chopper…) to convert it into electrical quantity setpoints (voltage and current). Afterward the electrical motor transforms electrical power into mechanical power before being conveyed to the wheels thanks to a reducer: this group of electromechanical organs is called the traction chain.
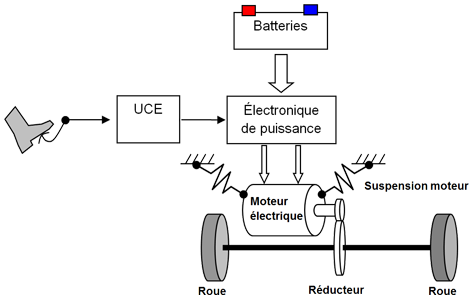
As in all physical systems, the traction chain is defined by a combination of characteristic variables such as inertia, friction, stiffness in addition to ECU’s (Electronic Control Unit, containing software strategies) reaction time and power electronics. Those quantities characterise the dynamic behavior of the traction chain. They affect vehicle behavior for each variation of the torque setpoint triggered by the driver. Some settings may generate oscillations, even with stable torque setpoints.
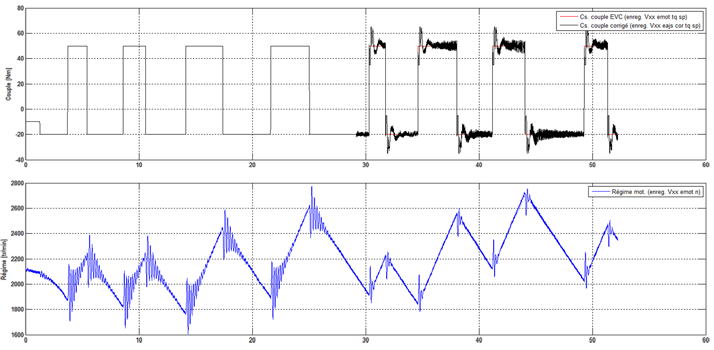
This illustration shows the real traction chain’s impact on motor speed during torque setpoint fluctuations. The dotted green line is the ideal response expected whereas the red one represents the actual response of the vehicle with damped oscillations. Oscillations are felt by the driver and can be very annoying.


With this second example (same legend), we note that the traction chain is oscillating in a particular area of the motor speed while the torque setpoint is stable. It means that the operating point is in the resonance range of the traction chain.
Oscillating problems during setpoint modifications, particularly when resonance occurs, are very harmful to the system. It not only happens with motorised systems, but in our case the phenomenon is amplified when we request high torque within a very short period.
In order to reduce oscillation issues, we developed a control method for electrical (or hybrid) vehicle traction chains.
The invention consists in a new controller structure with feedback based on a vehicle model. The controller represents vehicle behavior, its input is the torque and its output is the motor speed.
The adopted solution is :

During the test, the curative controller is activated. It results in a corrected torque setpoint limiting motor speed oscillations.
This study led to a Renault’s patent, co-signed by Acsystème.